Quadcopters සම්බන්ධ භෞතික විද්යාත්මක මූලධර්ම - I
මම කලින් ලිපියකදී පොරොන්දු වුණා වගේ මේ ලිපියෙන් Quadcopters සම්බන්ධ භෞතික විද්යාත්මක මූලධර්ම පිළිබදවයි සාකච්ඡා කරන්නයි බලාපොත්තු වන්නේ.
හැමෝටම තේරුම්ගන්න පුළුවන් වෙන විදිහට පුළුවන් තරම් සරලව විස්තර කරන්න උත්සාහ කරන්නම්. ඒ අතරම වැඩිපුර විස්තර හොයන අයට ඒ පිලිබද තොරතුරු දැනගන්න පුළුවන් ලින්ක් සපයන්නම්.
Quadcopter ගැන සදහන් කරන්න කලින් දැනගෙන සිටිය යුතු සිද්ධාන්ත කිහිපයක් තියෙනවා. අපි හැමෝම දන්නවා අපි ඉන්න අවකාශය ත්රිමාණ බව. ඒ කියන්නේ අපිට පුළුවන් අවකාශය තුළ ඉදිරියට-පසුපසට, වමට-දකුණට හෝ ඉහළට-පහලට ගමන් කරන්න. විද්යාත්මක කටයුතු වලදී මේ දිශා 3 හැදින්වීමේ පහසුව සදහා පිලිවෙලින් x, y, z කියන අකුරු වලින් හදුන්වනවා.
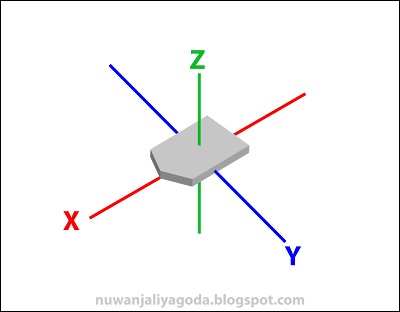
More : XYZ ඛණ්ඩාංක පද්ධතිය - Wikipedia
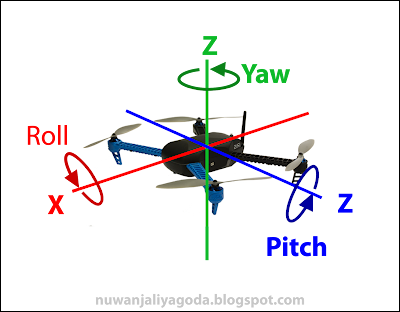
ඒ වගේම අපිට මේ අක්ෂ 3 ඔස්සේ හැරවෙන්නත් පුළුවන්. ඒ හැරවිය හැකි ආකාර 3: Yaw, Pitch, Roll කියලා හදුන්වනවා.
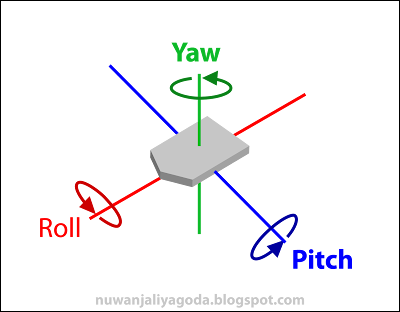
- Roll කියන්නේ x අක්ෂය ඔස්සේ වමට හෝ දකුණට පෙරලීමයි.
- Pitch කියන්නේ y අක්ෂය ඔස්සේ ඉදිරියට හා පසුපසට නැඹුරු වීමයි.
- Yaw කියන්නේ z අක්ෂය ඔස්සේ වමට හා දකුණට හැරවීමයි.
More : Aircraft principal axes - Wikipedia
දැන් මේ චලිත දිශා පැහැදිලි වෙන්න ප්රායෝගික උදාහරණ කීපයක් ඉදිරිපත් කරන්නම්.
දුම්රියක් සැලකුවොත් ඊට චලනය විය හැක්කේ ඉදිරියට හා පසුපසට පමණයි. එනම් එහි චලිතය x අක්ෂයට පමණක් සීමා වෙනවා.

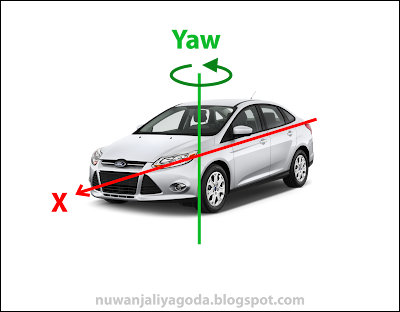
මෝටර් රථයකට ඉදිරියට පසුපසට යාමට අමතරව වමට හා දකුණය හැරෙන්නත් පුළුවන්. ඒ නිසා මෝටර් රථයකට x අක්ෂයේ චලිත වීමටත්, z අක්ෂයේ Yaw වීමටත් හැකියි.
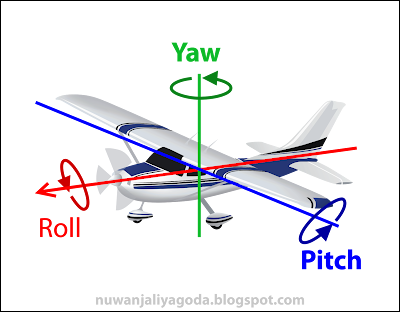
ගුවන් යානයකට ඉදිරියට ගමන් කළ හැකි අතර, Yaw Pitch හා Roll කියන 3 ආකාරයටම හැරවීම් සිදුකළ හැකියි.
දැන් Quadcopter එකක් සලකා බලමු. Quadcopter එකකට ඉදිරියට, පසුපසට, වමට, දකුණට, ඉහලට වගේම පහළටත් යන්න පුළුවන්. ඒ වගේම Yaw, Pitch, Roll කියන 3 ආකාරයටම හැරවෙන්නත් පුළුවන්. ඒ නිසයි Quadcopters අනිත් සියළුම වාහන අතරින් ඉදිරියෙන්ම ඉන්නේ.
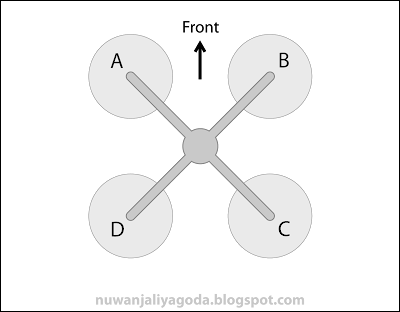
ඉදිරියේදී පැහැදිලි කිරීමේ පහසුව සදහා Quadcopter එකේ මෝටර් 4 පහත රූපයේ විදිහට A,B,C,D කියලා නම් කරන්නම්.
ඒ වගේම ඒ ඒ මෝටර් වල Propellers මත වාතය විසින් ඉහළට ඇතිකරන බලයයන්, Pa, Pb, Pc හා Pd කියලා නම් කරන්නම්.
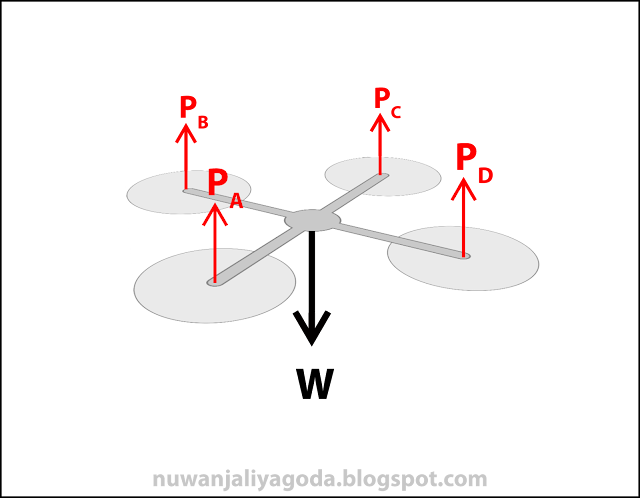
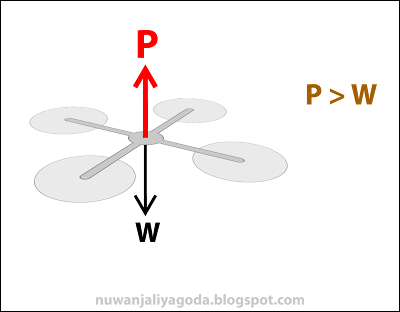
Propellers 4 මත ඇතිවන බල වල සම්ප්රයුක්ත බලය, අවශ්ය වෙලාවට P කියලා ගන්නම්. Quadcopter එකේ ස්කන්ධය නිසා පහලට ඇතිවන බලය (බර) W කියලා නම් කරන්නම්.
Quadcopter එකක් ඉහලට හා පහලට ගමන් කරවීම
Quadcopter එකක් පොළාවෙන් ඉහලට එසවන්නේ එහි Propellers මගින් ඉතා වේගයෙන් වාතය පහළට තෙරපීම නිසයි. ඒ සිදුවීම නිව්ටන්ගේ 3 වන නියමය අනුව පහසුවෙන් පැහැදිලි කරන්න පුළුවන්.
වස්තුවක් මත ඇතිවන සෑම ක්රියාවකටම සමාන වූ ද ප්රතිවිරුද්ධ වූ ද ප්රතික්රියාවක් වස්තුව මගින් ඇතිකෙරේ.
More : නිව්ටන් නියම - Wikipedia
Quadcopter එකේ තටු මගින් වාතය මත පහලට බලයක් ඇති කරනවා. වාතය මගිනුත් ඊට සමාන බලයක් Propellers මත ඇති කරනවා. Propellers කැරකෙන වේගය අනුව වාතය මත පහලට ඇතිකරන බලය වෙනස් වෙනවා. ඒ වගේම වාතය මගින් Propellers මත ඇතිවන බලයත් වෙනස් වෙනවා.
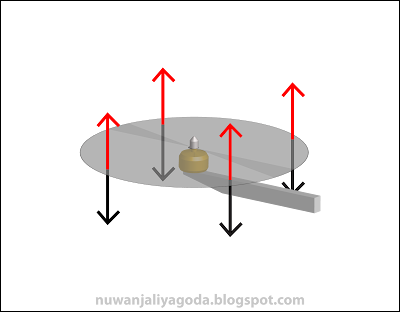
- රතු: වාතය මගින් Propellers මත ඇතිකරන බලය
- කළු: Propellers මගින් වාතය මත ඇතිකරන බලය
Propellers කැරකෙන වේගය වැඩි කරගෙන යනකොට එක් අවස්ථාවක වාතය මගින් Propellers මත ඇතිකරන බලය, Quadcopter එකේ බරට වඩා වැඩි වෙනවා. එවිට ඇතිවෙන සම්ප්රයුක්ත බලය ඉහලට ක්රියාකරන නිසා Quadcopter එක ඉහලට ත්වරණය වෙනවා.
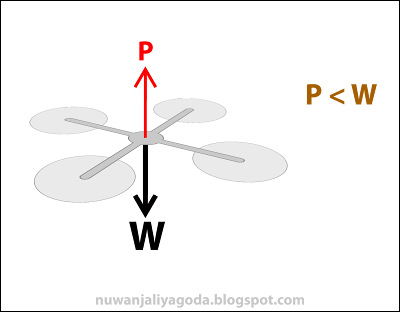
නැවත Propellers වල වේගය අඩු කළොත් වාතය මගින් Propellers මත ඇතිකරන බලය, එහි බරට වඩා අඩු වන නිසා නැවතත් Quadcopter එක පහලට ත්වරණය වෙනවා.
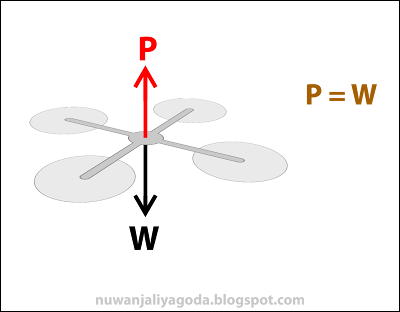
Propellers මත වාතයෙන් ඇතිකරන බලය, Quadcopter එකේ බරට සමාන නම් Quadcopter එක ගුවනේ එකතැන රැදී පවතිනවා.
Quadcopter එක ඉහල පහල යනකොට මෝටර් 4 ම වේගය එක සමානව වෙනස් වන නිසා කෙලින්ම ඉහලට හා පහලට ගමන් කරනවා. එත් A,B,C,D මෝටර් හතරේ වේගයන් අඩු වැඩි කිරීම මගින් Quadcopter එක ඉදිරියට, පසුපසට, වමට, දකුණට ගමන් කරවන්න පුළුවන්.