Quadcopters සම්බන්ධ භෞතික විද්යාත්මක මූලධර්ම - II
Quadcopter එකක් ඉදිරියට ගමන් කරවීම
Quadcopter එක ගුවනේ රැදී පවතින අතර C හා D මෝටර් වල වේගය වැඩි කළ අවස්ථාවක් සලකමු. දැන් C,D Propellers මගින් වැඩි එසවුම් බලයක් ඇතිවන නිසා Quadcopter එකෙහි පිටුපස පමණක් ඉහලට එසවෙයි.
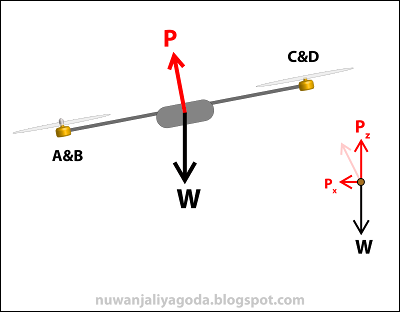
තවදුරටත් බර පහළටම ක්රියා කරන නමුත්, දැන් එසවුම් බලය ක්රියා කරන්නේ මදක් ඉදිරියට නැඹුරු දිශාවකටයි.
රූපසටහනේ දැක්වෙන පරිදි, P බලයේ z අක්ෂය ඔස්සේ සංරචකය W ට එරෙහිව ක්රියා කරමින් Quadcopter එක තවදුරටත් එකම මට්ටමක පවත්වාගනී. නමුත් දැන් P බලයේ x අක්ෂය ඔස්සේ නව බලයක් ඇතිවී ඇත.
නිවුටන්ගේ දෙවන නියමයට අනුව දැන් Quadcopter එක මත අසංතුලිත බලයක් ඇතිවී පවතින නිසා එය ඉදිරිපසට ත්වරණය වේ. එනම් ඉදිරිපසට ගමන් කරයි.
වස්තුවක් මත බාහිර අසංතුලිත බලයක් ක්රියාකිරීම නිසා වස්තුවේ ගම්යතාව වෙනස්වන සීඝ්රතාව, යොදන බලයට අනුලෝමව සමානුපාතික වන අතර, ගම්යතාව වෙනස්වන දිශාව බලයේ දිශාව වේ.
වමට හා දකුණට ගමන් කරවීම
මේ සදහා භාවිත කරන්නේත් ඉහත සදහන් මූලධර්මයමයි. Quadcopter එක වමට ගමන් කරවීමට අවශ්ය වූ විට B හා D මෝටර් වල වේගය වැඩිකළ යුතුයි. දැන් B, D ඉහළට එසවෙන නිසා P බලයේ සංරචකයක් වම් පැත්තට ක්රියා කරනවා. එවිට Quadcopter එක වම් පැත්තට චලනය වෙනවා.
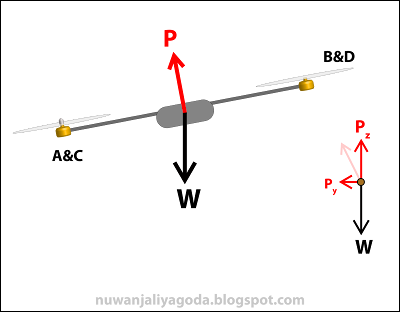
මේ විදිහටම දකුණු පැත්තට ගමන් කරවීමට A හා C මෝටර වල වේගයයන් වැඩි කළ යුතුයි.
වමට හා දකුණට හැරවීම
මම Propellers ගැන සදහන් කිරීමේදී සදහන් කළා Quadcopter එකක් සදහා වාමාවර්ත හා දක්ෂිණාවර්ත විදිහට Propellers දෙවර්ගයක් භාවිතා කරන බව. දැන් පැහැදිලි කරන්නම් ඇයි ඒ විදිහට Propellers දෙවර්ගයක් භාවිත කළ යුත්තේ කියලා.
ඔබ දැනටමත් නිවුටන්ගේ 3 වන නියමය ගැන දන්නවා. ඒ නියමට භ්රමණය වන පද්ධතියක් සදහාත් වලංගුයි. ඒ කියන්නේ Propeller එක දක්ෂිණාවර්තව භ්රමණය වෙනකොට මෝටරය මත වාමාවර්තව බලයක් වගේ දෙයක් ඇතිවෙනවා. ඒ බලය ව්යාවර්තය කියලයි හදුන්වන්නේ. දැන් ඒ වාමාවර්ත ව්යාවර්තය නිසා මෝටරය වාමාවර්තව භ්රමණය වෙන්න පටන් ගන්නවා.
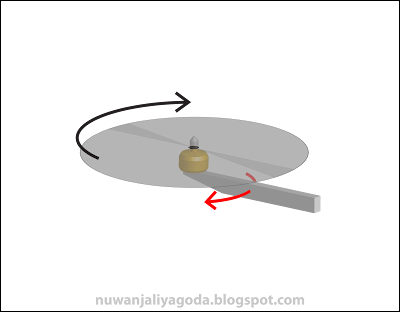
තනි Propeller එකක් භාවිත වන හෙලිකොප්ටරයකත් මේ දේ ම සිද්ධ වෙනවා. ප්රධාන තටුව දක්ෂිණාවර්තව කැරකෙනකොට, හෙලිකොප්ටර් බද, වාමාවර්තව කැරකෙන්න උත්සාහ කරනවා. මේක වලක්වන්න තමයි හෙලිකොප්ටරයේ පිටුපසින් තවත් තටුවක් භාවිතා කරලා තියෙන්නේ.

Quadcopter එකකදී පාවිච්චි වෙන්නේ මීට වඩා තරමක් වෙනස් මූලධර්මයක්. මම ඒක තටු 2 ක් පමණක් තියෙන පද්ධතියක් මගින් පැහැදිලි කරන්නම්.
දක්ෂිණාවර්ත භ්රමණය Clockwise කියන අරුතින් CW ලෙසත්, වාමාවර්ක භ්රමණය Counter-clockwise කියන අරුතින් CCW විදිහටත් හදුන්වනවා. (Clockwise කියලා කියන්නේ ඔරලෝසු කටුව කැරකෙන දිශාව කියන එක. ඒ විදිහට ගත්තාම මතක තියාගන්න ලේසියි.)
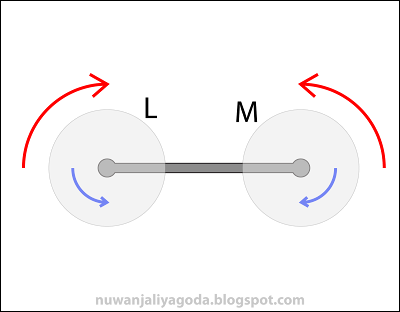
L තටුව CW දිශාවට කැරකැවෙන විට L මෝටරය CCW දිශාවට කැරකැවෙන්න උත්සාහ දරනවා. M තටුව CCW දිශාවට කැරකැවෙන විට, M මෝටරය CW දිශාවට කැරකැවෙන්න උත්සාහ කරනවා. මෝටර් 2 ම එකම කැරකවෙන්නේ එකම වේගයකින් නම්, මෝටර් 2 මත වාමාවර්තව හා දකෂිණාවර්කව ඇතිවන ව්යාවර්තයනුත් සමානයි. ඒ නිසා LM තවදුරටත් භ්රමණයකට ලක් නොවී තියෙනවා.
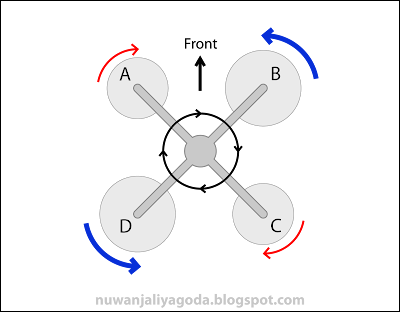
Quadcopter එකක යාබද තටු විරුද්ධ දිශා වලට කැරකෙන විදිහට සම්බන්ධ කළාම ඉහත සදහන් කරපු ගැටළුව විසදෙනවා. මේ රූප සටහනේ තියෙන්නේ තටු සම්බන්ධ කරන ආකාරය පිළිබද සම්මත සැකැස්මයි.

දැන් බලමු Quadcopter එක z අක්ෂය ඔස්සේ Yaw වෙන්නේ කොහොමද කියලා. කලින් සදහන් කළා වගේම මෝටර් 4 ම එකම වේගයෙන් කැරකෙනවානම් විතරයි මෝටර් වල ඇතිවෙන ව්යාවර්තට උදාසීන වන්නේ.
Quadcopter එක දකුණු පැත්තට හැරවීමට අවශ්ය අවශ්ය වූ අවස්ථාවක් සලකමු. දැන් A හා C මෝටර් සාමාන්ය වේගයෙන්ම කැරකෙන අතරම B හා D මෝටර් වල වේගයයන් වැඩි කරනවා. එතකොට B,D තටු මගින් වාමාවර්තව ඇතිකරන ව්යාවර්තය, A,C තටු මගින් දක්ෂිණාවර්තව ඇතිකරන ව්යාවර්තයට වඩා වැඩියි. දැන් A, C මෝටර් මත තටු මගින් ඇතිවන ව්යාවර්තය, B, D වල එම අගයට වඩා අඩුයි. ඒ නිසා Quadcopter එක දක්ෂිණාවර්තව කැරකෙන්න පටන් ගන්නවා.
මේ විදිහටම තමයි වමට හැරවීමත් සිදුවෙන්නේ. එහිදී A,C වේගය තමයි වැඩි කරන්න ඕන. සරළවම කිව්වොත් මෙතනදී වෙන්නේ අපි වේගය වැඩි කරන දිශාවට ප්රතිවිරුද්ධ දිශාවට Quadcopter එක කැරකවීමයි.