
L298 Motor Drive IC
කලින් ලිපි 2 න් කථා කලේ මෝටරයක භ්රමණ දිශාව හා වේගය පාලනය කරන්න පාවිච්චි කරන උපක්රම ගැන. ඒ අනුව දැන් ඔයාලා H Bridge ගැනයි, PWM ගැනයි දන්නවා.
කියවලා නැත්නම් මෙතනින් ඒ ලිපි දෙක කියවලා බලන්න.
මේ ලිපියෙන් කථා කරන්නේ මෝටර පාලනයට බහුලවම පාවිච්චි කරන L298 කියන IC එක ගැනයි. මේක තමයි දැනට පහසුවෙන්ම හොයාගන්න පුළුවන් සහ වඩාත්ම සුදුසු IC එක. මේ IC එකේ බාහිර පෙනුම මේ වගෙයි.

මේ සදහා L293 IC එකත් පාවිච්චි කරන්න පුළුවන්. ඒත් ඊට වඩා L298 IC එක හොදයි. වැඩි ධාරාවක් පාලනය කරන්න පුළුවන්. ඒ වගේම Heat Sink එකක් හයි කරන්න පුළුවන් නිසා රත්වීම පිලිබද බය වෙන්න ඕනත් නෑ.
මේ තියෙන්නේ Pin Diagram එක. (වඩාත් විස්තරාත්මක datasheet එක මෙතනින් Download කරගන්න.)
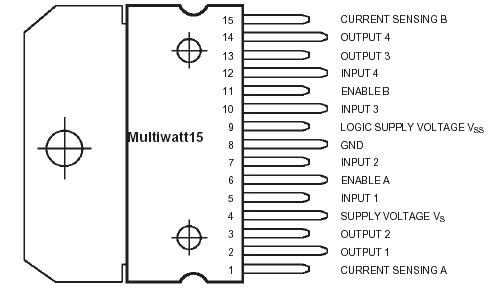
මේ IC එකෙන් A හා B විදිහට මෝටර් 2 ක් පාලනය කරන්න පුළුවන්. හැම මෝටරයකටම වෙන් කරපු Pin 5 බැගින් තියෙනවා. මේවායින් 3 ක් පාවිච්චි වෙන්නේ විධාන ලබාදෙන්නයි. (Inputs විදිහට) ඉතිරි Pin 2 මෝටරය සවි කරන්නයි පාවිච්චි කරන්නේ. (Output විදිහට)

In1, In2, En, Out1, Out2 කියලා හදුන්වලා තියෙන්නේ මෝටර් 2ට වෙන වෙනම අයිති pins පොදුවේ හදුන්වන නම්. විස්තරකිරීම් වලදී මාත් පාවිච්චි කරන්නේ ඒ කෙටියෙදුම් කීපය තමයි.
Out 1, Out 2 කෙලින්ම මෝටරයට සම්බන්ධ වෙන්නේ. (හැබැයි කලින් ලිපියක කිව්වා වගේම ඩයෝඩ් දාන්න ඕන. නැත්නම් Circuit එකට හානි වෙන්න ඉඩ තියෙනවා.)
In 1, In 2 කියන අග්ර වලින් මෝටරය කැරකෙන්න ඕන දිශාව ගැන උපදෙස් දෙන්න පුළුවන්.
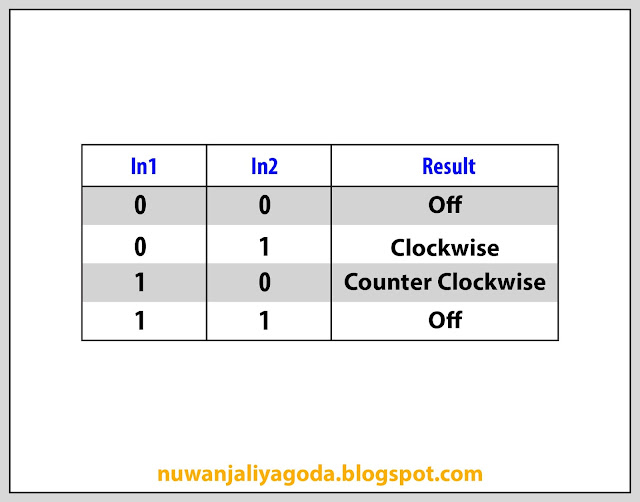
En අග්රය තමයි මෝටරය කැරකෙනවද නැද්ද කියලා තීරණය කරන්නේ. (In1, In2 පින් වලට පිලිවෙලින් 1,0 හෝ 0,1 සංඥා ලබාදුන්නත්, මේ En අග්රයට 1 සංඥාව ලැබෙනකම් මෝටරය වැඩ කරන්නේ නෑ)
- En = 0 (0 v / logic Low) නම්, මෝටරය OFF
- En = 1 (+5 v / logic High) නම් මෝටරය ON
මෝටරය දිගටම කරකවන්න ඕන නම් මේක +5V ට සම්බන්ධ කරන්න. වේගය වෙනස් කරන්න බලාපොරොත්තු වෙනවා නම්, Arduino වල PWM pin එකකට සම්බන්ධ කරලා analogWrite() කරන්න පුලුවන්.
මෝටර් දෙකටම Current Sensing කියලා Pin එක බැගින් තියෙනවා. මේක පාවිච්චි කරලා මෝටරයට යන ධාරාව ගණනය කරගන්න පුලුවන්. දැනට ඒ පහසුකම අවශ්ය වෙන්නේ නැති නිසා ඒ අග්රය Ground(0V) වලට සම්බන්ධ කරනවා. (කඩෙන් ගන්න තියෙන ගොඩක් Module වලත් මේ අග්රය පාවිච්චි වෙන්නේ නෑ.)
මේ L298 IC එක පාවිච්චි කරලා Motor Drive එකක් හදාගන්න විදිහ මම ඊළග ලිපියෙන් කියාදෙන්නම්.