Quadcopters 14 - Configuring CC3D
Quadcopters නිර්මාණය ගැන මුල සිට ඉදිරිපත් කරන ලිපි පෙලේ අවසාන ලිපි කිහිපය අතරින් එකක් තමයි මම අද ඉදිරිපත් කරන්නේ.
දැන් ඔයාලා Quadcopter එකේ එකලස් කිරීම් වලින් වැඩිහරියක් ඉවර කරලයි තියෙන්නේ. ඒ කියන්නේ Power Distribution Board, ESC, Motors හා Flight Controller එක සැකිල්ලට සම්බන්ධ කරගෙනයි තියෙන්නේ.
මම මේ ලිපියෙන් කියාදෙන්නේ කොහොමද Flight Controller එක නිැරදිව Configure (Setup) කරගන්නේ කියන එකයි.
මෙ සදහා පාවිච්චි කරන්නේ Libre Pilot කියන මෘදුකාංගයයි. මේ ලින්ක් එකෙන් ඔයාලට Software එක Download කරගන්න පුළුවන්.
![]()
Libre Pilot කියන්නේ CC3D වගේ Flight Controllers Configure කිරීම සදහාම හදපු මෘදුකාංගයක්. මේ වගේ FC සදහා හදලා තියෙන මෘදුකාංග, GCS (Ground Controll Station) කියලා කෙටියෙන් හදුන්වනවා.
Libre Pilot GCS එකෙන් FC එක Configure කිරීමට අමතරව තව ගොඩක් දේවල් කරන්න පුළුවන්. (වැඩි විස්තර ඕන නම් මෙතනින් දැනගන්න පුළුවන්. librepilot.org) දැනට මේ ලිපියෙන් Configurations ගැන විතරක් කථා කරමු.
Libre Pilot මෘදුකාංගය install කරගත්තට පස්සේ, CC3D Boards එක පරිගණකයට සම්බන්ධ කරන්න.
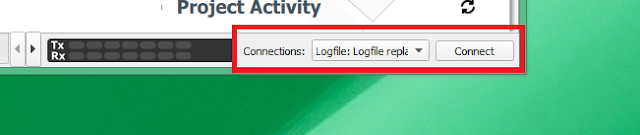
එතකොට ඒකට අදාල Drivers, ස්වයංක්රියවම install වෙනවා. ඊළගට Software එකට USB Port තෝරලා දෙන්න වෙනවා. ඒ සදහා යටම පේලියේ දකුණින් තියෙන Connections ලිස්ට් බොක්ස් එක පාවිච්චි කරන්න. (ගොඩක් වෙලාවට අදාළ Port එක Auto select වෙලයි තියෙන්නේ.) Board එක Connect වෙලා නැත්නම් ඒ ලගින්ම තියෙන Connect කියන බොත්තම ඔබන්න.
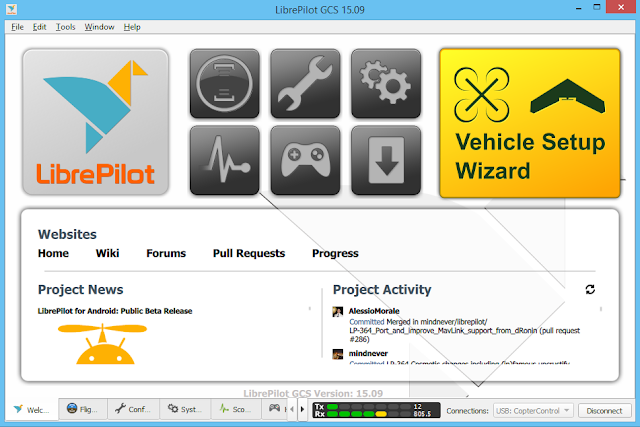
දැන් මේ වින්ඩෝවේ කහ පාටින් ලොකුවට තියෙන, Vehicle Setup Wizard කියන බොත්තම ඔබන්න.
දැන් මතුවෙන Setup Wizard එකේදී ඔයාලා කරන්න ඕන දේවල් ඉතා පැහැදිලිව විස්තර කරලා තියෙනවා. ඒ ඒ Steps වලදී දීලා තියෙන උපදෙස් වලට අනුව ක්රියා කරන්න විතරයි තියෙන්නේ. ඒ නිසා මම වැඩිපුර විස්තර කිරීම් නැතිව, Screenshots වලින්ම කරන්න ඕන දේවල් ඉදිරිපත් කරන්නම්.
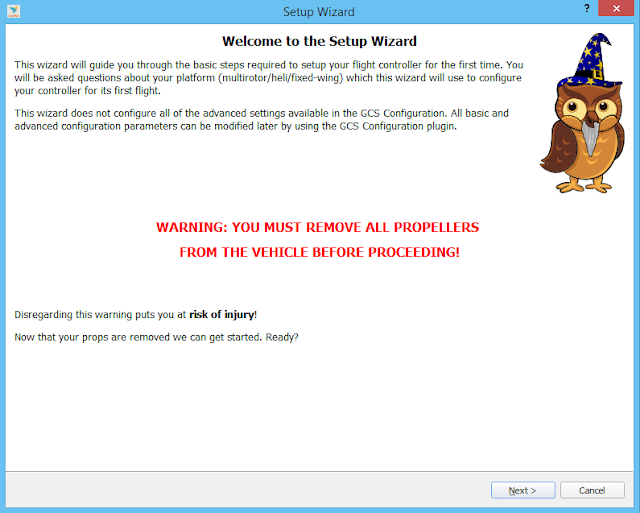
මේ වෙද්දී Propellers සම්බන්ධ කරලා තියෙන්න බෑ. ඔයාලත් ආසාවට හරි මෝටර් වලට Propellers හයිකරලා බැලුවා නම් දැන් ඒවා ආපහු ගලවන්න වෙනවා.
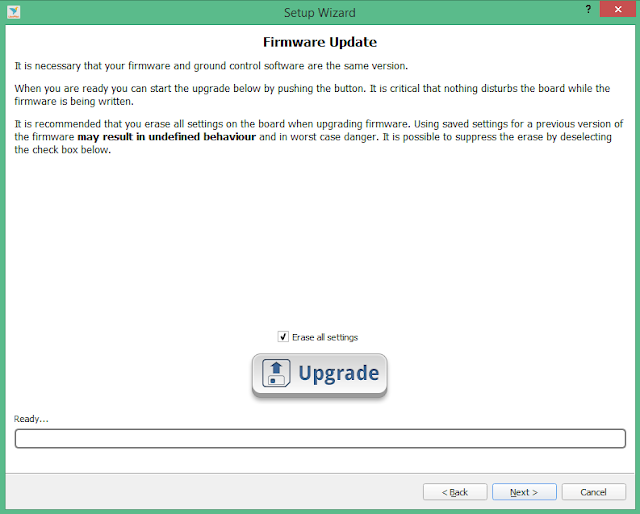
දැන් අහයි FC එකේ Firmware එක (මෙහෙයුම් පද්ධතිය වගේ එකක්) යාවත්කාලීන (Upgrade) කරන්න ඕනද කියලා. කැමති නම් Upgrade කරගන්න. (Upgrade වෙන අතර විදුලිය විසන්ධි වීමක් හෝ USB plug එක ගැලවීමක් නොවෙන්න පරිස්සම් වෙන්න.) මේක අත්යාවශ්යම නෑ කියලා හිතෙනවා නම් Next කරන්න.
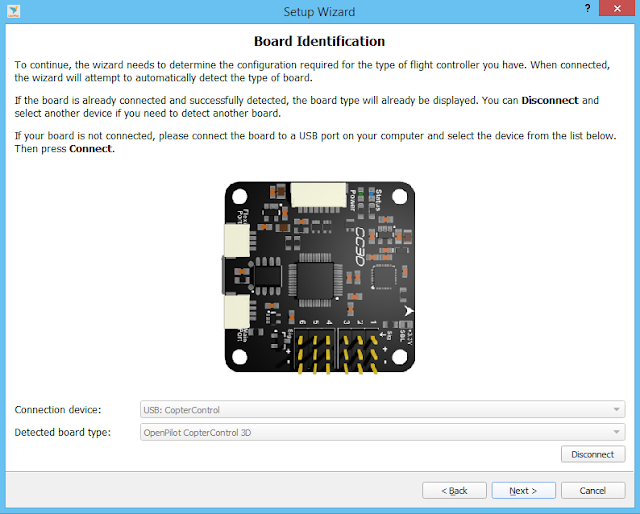
මෙතනදී කරන්නේ Board එක හදුනාගැනීමයි. Board එක පරිගණකයට සම්බන්ධ කරලා නැත්නම් දැන් අනිවාර්යයෙන්ම සම්බන්ධ කරන්න වෙනවා.
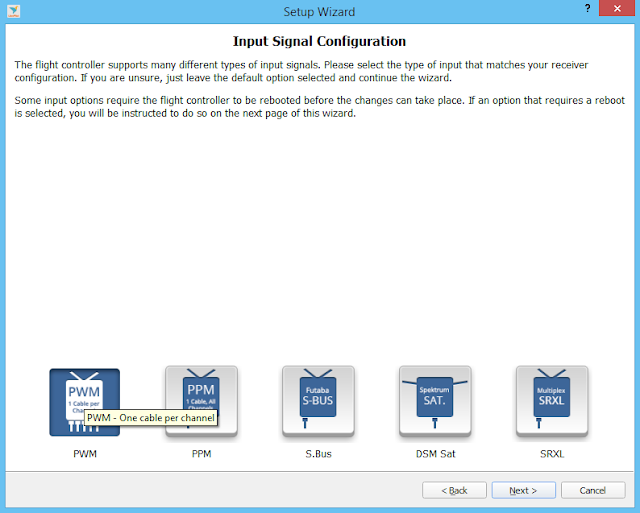
මෙතනදී අපි පාවිච්චි කරන Receiver එකෙන් දත්ත එවන ආකාරය තෝරන්න ඕන. සාමාන්යයෙන් PWM තමයි තෝරන්න තියෙන්නේ. ඔයාලා වෙනත් ක්රමයක් භාවිතා වෙන Receiver එකක් පාවිච්චි කරනවා නම් ඒ Receiver එකට අදාල ක්රමය තෝරන්න.
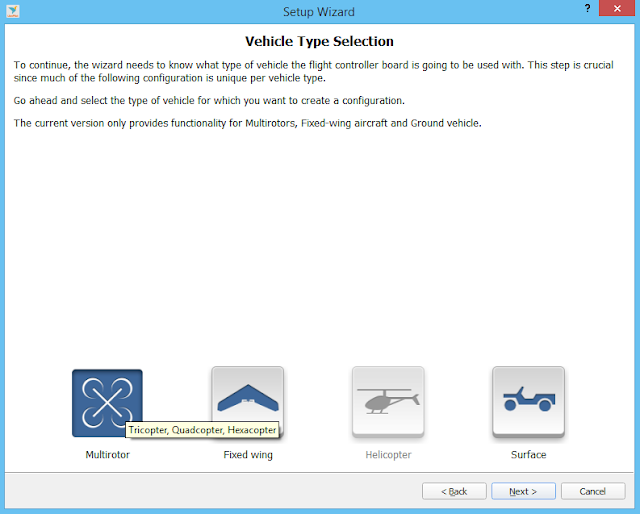
Quadcopter එකක් හදන නිසා මෙතනින් Multirotor තෝරන්න.

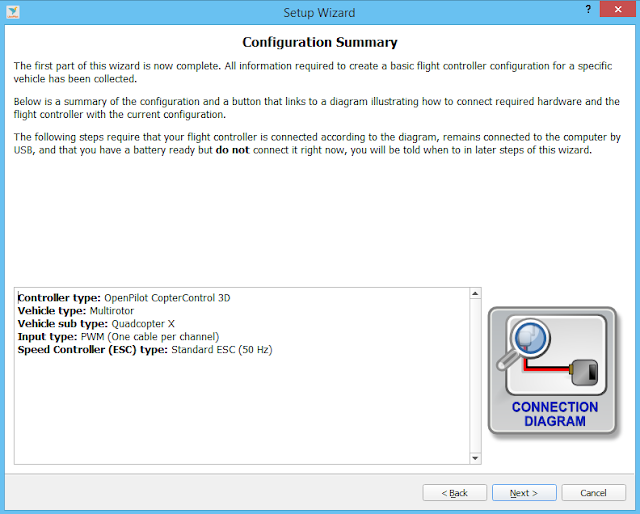
මෙතනින් Frame එකට ගැලපෙන Type එක තෝරගන්න. සාමාන්යය Quadcopter එකක් නම් “Quadcopter X” තමයි තෝරන්න ඕන. (පින්තූරේ බැලුවම තේරෙනවා නේද ?)

දැන් ESC එකේ සංඛ්යාතය තෝරන්න ඕන. ඒ ගැන දන්නේ නැත්නම්, Standard ESC විකල්පය තෝරන්න. එතකොට Software එකෙන්ම අදාල වර්ගය ස්වයංක්රියවම හොයාගනී.
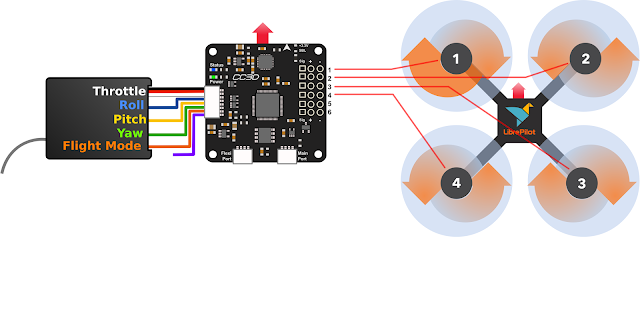
දැන් Configurations වල පළවෙනි කොටස ඉවරයි. මේ වෙද්දී ඔයාලා මේ Connection Diagram එකේ තියෙන විදිහට උපාංග ටික සවිකරගෙන ඉන්න ඕන. (මෝටර් වලට දීලා තියෙන අංක ගැන සැලකිලිමත් වෙන්න. රූපයේ තියෙන පිළිවෙලටම තියෙන්න ඕන.)
දැන් මීළග පියවරට යන්න කලින් Quadcopter එක සමතලා මතුපිටක, හොදින් පිහිටන විදිහට තියන්න.
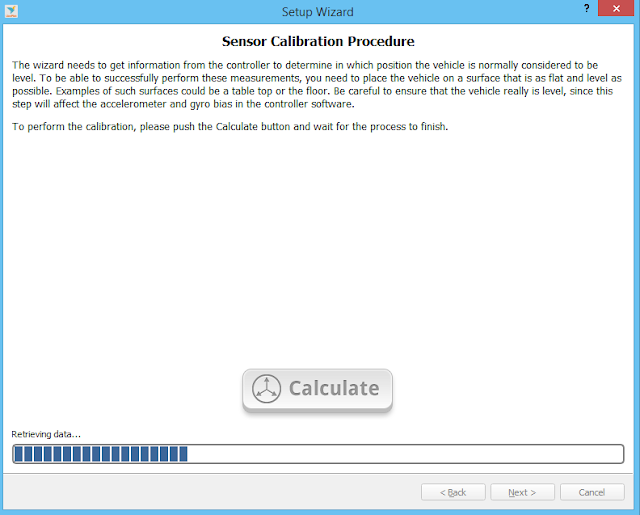
දැන් Calculate කියන බොත්තම ඔබන්න.
Quadcopter එක දැන් තියෙන පිහිටුම තමයි ඉදිරියේදී ඒකේ සාමාන්යය (Default) පිහිටුම කියලා සැලකෙන්නේ. Quadcopter එක ඇදට තියලා Calculate බොත්තම එබුවොත්, Quadcopter එකේ Gyroscope / Compass කියන Sensors 2 හරියට වැඩකරන්නේ නැතිවේවි. ඒ වගේම ගුවන්ගත කරනකොට පැත්තට ඇලවෙලා ගමන් කරන්නත් ඉඩ තියෙනවා.
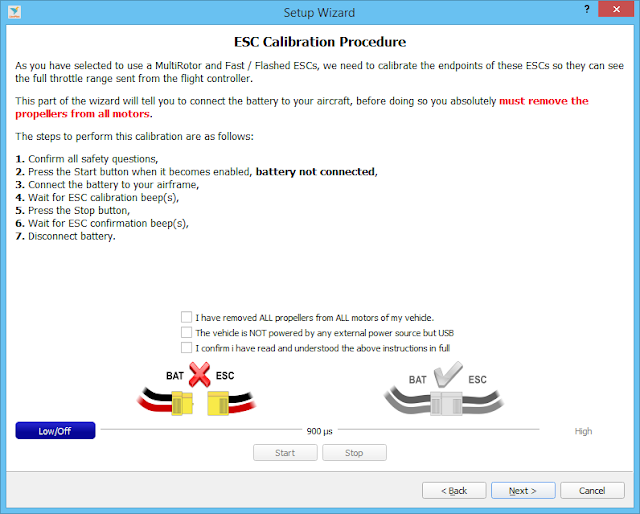
මෝටර් වලට Propellers සවි කරලා නම් තියෙන්නේ, දැන් ඒවා ඉවත් කරන්න ඕන. බැටරියත් ගලවන්න. යටින් තියෙන Safety Questions 3 ම අනුගමනය කළාට පස්සේ ඒවා Tick කරන්න. ඊළගට, Start බොත්තම ක්ලික් කරන්න.
දැන් බැටරිය සම්බන්ද කරන්න. එතකොට, ESC වලින් දිගටම බීප් සද්ද කිහිපයක් එයි. (දැන් FC එකෙන් ESC 4 ම Programming කරනවා.)
බීප් සද්ද ටික ඉවර වුණාට පස්සේ, Stop කියන බොත්තම ඔබන්න. (බීප් සද්ද වල එක වටයක් ඉවර වුණාම තත්පර 2-3 ක නිහැඩියාවක් තියෙනවා. මේ කාලය ඉවර වෙන්න කලින් Stop කලේ නැත්නම් ආයෙත් මුල ඉදලා Programming කරන්න පටන්ගන්නවා.)
දැන් ආයෙත් සැරයක් ESC වලින් පොඩි බීප් එකක් එයි. ඒක ආවට පස්සේ බැටරිය නැවත විසන්ධි කරන්න.
Next කරන්න.
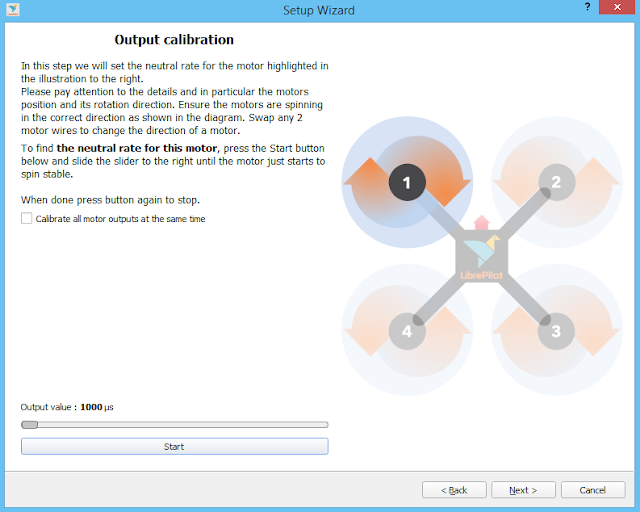
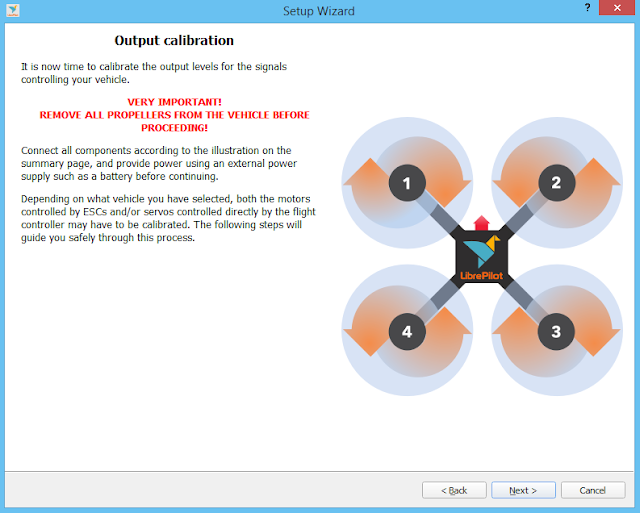
දැන් තියෙන්නේ ටිකක් අමාරු පියවරක්. මෙතනදී එක සැරේකට එක මෝටරය ගානේ Tune කරන්න ඕන.
Start බොත්තම ඔබලා, Output value අගය ටිකින් ටික වැඩි වෙන විදිහට Slider එක දකුණට ඇරන් යන්න. දැන් මෝටරය හෙමීට කැරකෙන්න පටන් ගන්නවා. එතකොට Slider එක තව පොඩ්ඩක් දකුණට ඇරන් Stop බොත්තම ඔබන්න. (මෙතනදී අපි කරන්නේ මෝටරය කැරකෙන්න ලැබෙන්න ඕන අවම සංඥාව මොකක් ද කියලා හොයලා දෙන එකයි.)

ඒ අතරදිම මෝටරය කැරකෙන දිශාව හරිද කියලා බලන්න ඕන. (කැරකෙන්න ඕන පැත්ත, දකුණෙන් තියෙන රූපසටහනේ පෙන්නනවා.) කැරකෙන්නේ වැරදි පැත්තට නම්, ESC එකෙන් මෝටරයට යන වයර් 3න් කැමති වයර් 2ක් මාරු කරලා හයි කරන්න.
මේ විදිහට මෝටර් 4 ම හදාගන්න.
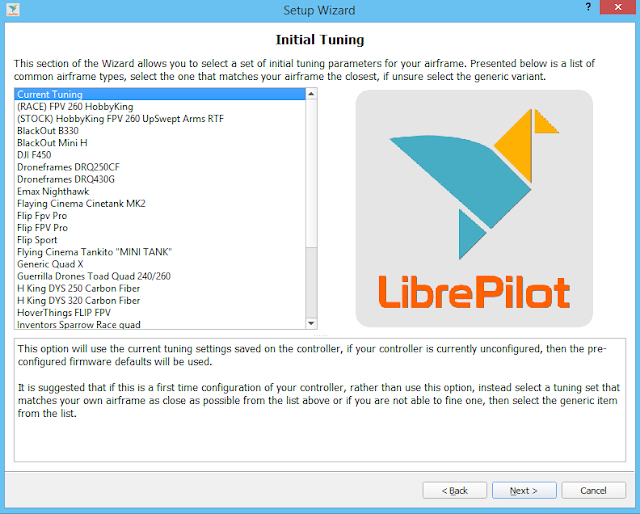
මේක තමයි අන්තිම පියවර. Quadcopter එකේ Frame එකට අදාල විශේෂ Tuning තෝරලා දෙන්නයි තියෙන්නේ. මෙතන ජනප්රිය Frames කිහිපයක් තියෙනවා. ඒවා Select කලාම, ඒ ඒ Frames සදහාම විශේෂයෙන් හදලා තියෙන Settings ආදේශ වෙනවා. ඔයාලා පාවිච්චි කරන Frame එක මේ ලැයිස්තුවේ නැත්නම්, “Generic Quad X” කියන විකල්පය තෝරන්න වෙනවා.
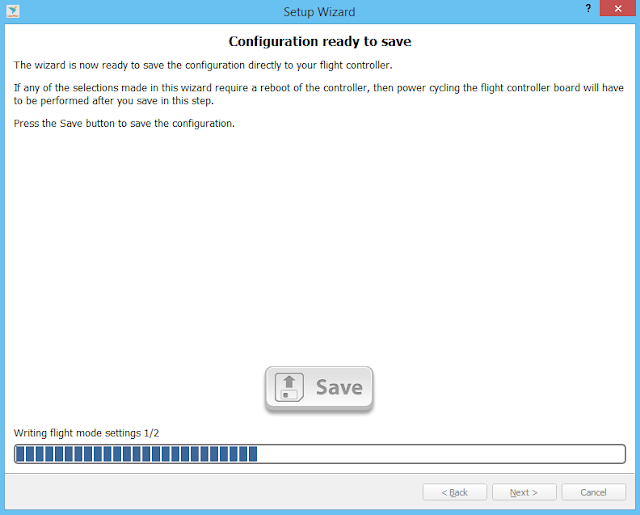
මේ පියවරේදී අපි හදාගත්ත Settings සියල්ල බොර්ඩ් එකේ Save කරනවා. Save වෙලා ඉවර වුණාම මෙන්න මේ විදිහේ වින්ඩෝවක් පෙන්වාවි.
දැන් Quadcopter එකේ Flight Controller එක Configure කරගෙන ඉවරයි. Transmitter එක Configure කරන ආකාරය (Transmitter Setup Wizard) මීළග ලිපියෙන් කියලා දෙන්නම්.